






Also in Ophthalmology, the future will see an increasing use of robotic machines, especially in surgery.

The latest news announces the use of robots also in cataract surgery, which is the most common eye surgery procedure worldwide. The novelty is a prototype using a robotic arm guided by a 3D camera, which is showing very promising results in initial feasibility studies.
Robots in ophthalmology
For years, robots have fascinated and frightened us at the same time, because we admire their precision, but are afraid of guided systems 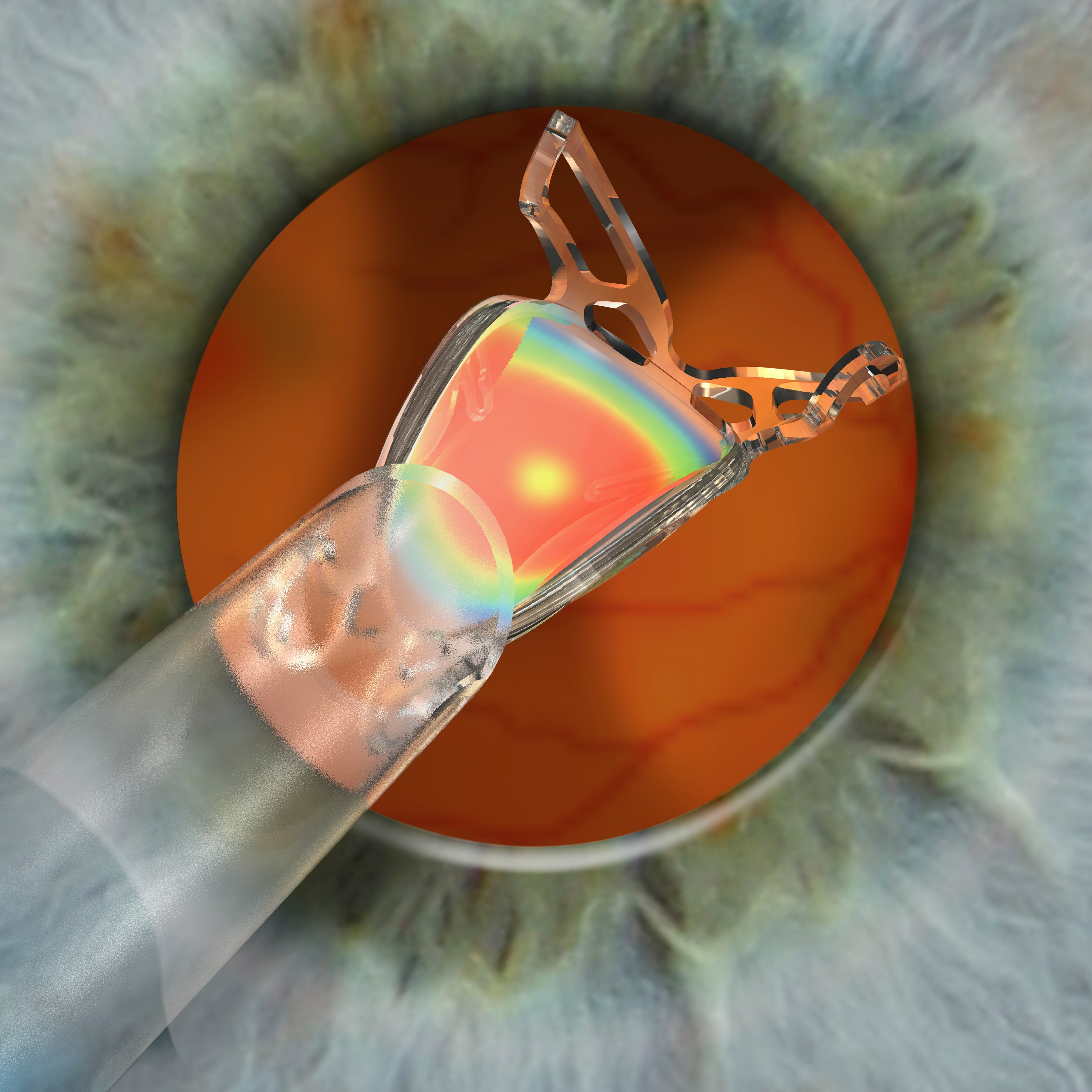 solely by mathematical algorithms. These fears are particularly pronounced in medicine, a field in which people in a vulnerable condition are managed. However, it is precisely surgery that constitutes an optimal terrain for the use of robots, because the robot has only two hands, does not shake, does not get tired, can operate through very small incisions and allows perfectly reproducible operations. These features allow robotic surgery in areas that would not otherwise be accessible.
solely by mathematical algorithms. These fears are particularly pronounced in medicine, a field in which people in a vulnerable condition are managed. However, it is precisely surgery that constitutes an optimal terrain for the use of robots, because the robot has only two hands, does not shake, does not get tired, can operate through very small incisions and allows perfectly reproducible operations. These features allow robotic surgery in areas that would not otherwise be accessible.
The first robot to enter the operating theatre was, in 2000, the Da Vinci system and have since grown to the current 5,000 systems worldwide. The main areas of use are prostate cancer surgery and orthopaedic hip and knee surgery.
If we focus on ophthalmology, many surgeons actually already use robots, as in the case of cataract surgery with femtosecond laser. The femtosecond laser is a robot that operates according to a pre-programmed sequence: it incises the capsule frontally in a perfect circle, reduces the nucleus of the crystalline lens into fragments, makes arcuate stromal incisions for the correction of astigmatism and prepares incisions that close themselves on the corneal tunnel in any position and configuration.
In the field of retinal surgery, for which it is essential to eliminate or reduce micro-tremors in the hand and operate in very small spaces, the Preceyes system. This system is guided by the surgeon's hand like the transmission chain of a car: if the surgeon moves his hand by 1-2 cm, the robot will only make a movement of 0.5 - 1 mm. This makes it possible to inject a retinal vein or dissect epithelial membranes with a precision that would not be possible without the robot.
Cataracts and 3D robotic systems
For cataract surgery, the crucial factor for successful robotic surgery is the precision in tracking and positioning of the robotic arm, and for this purpose the new 3D system uses a real-time stereo-tracking system that simultaneously tracks both the eye and the instrument. In order to maintain a minimalist design, the prototype was made by including an industrial robotic arm, adapted with a special attachment for mounting the instruments. Instead of an external laser, the robotic system is equipped with a high-frequency electric instrument for capsulotomy. A stereo camera performs tracking and imaging instead of the operating microscope. In addition to monitoring the position and rotation of the eye, the tracking system can acquire data to compensate for surgically induced changes, such as deformation of the eye resulting from the introduction of instruments.
The performance of this prototype has so far been evaluated with mechanical eye models for instrumental guidance, photorealistic artificial eyes to calibrate tracking, and pig's eyes to test the overall performance of the system in performing surgical acts. So far, the system has been used for corneal incisions and capsulotomies and has proven to operate with sufficient precision, fluidity of movement and speed. The 3D camera was able to triangulate a point with an accuracy of ±0.05 mm, and the same level of precision was achieved in instrument positioning. With this type of performance, the robot is potentially able to guide the instruments into the anterior chamber through a small opening in the limbus as an access point and pivot. Comparison with recordings of operations performed by human surgeons shows that the robotic arm moves with human-like speed and fluidity.
Developments in progress
The tested prototype currently mounts a single 'fast-swap' holder, which requires the robotic arm to be removed from the eye for manual or robotic replacement of operating instruments. An alternative under development involves a holder with an automatic 'revolver-style' changer adapted for multiple surgical instruments.